Introduction
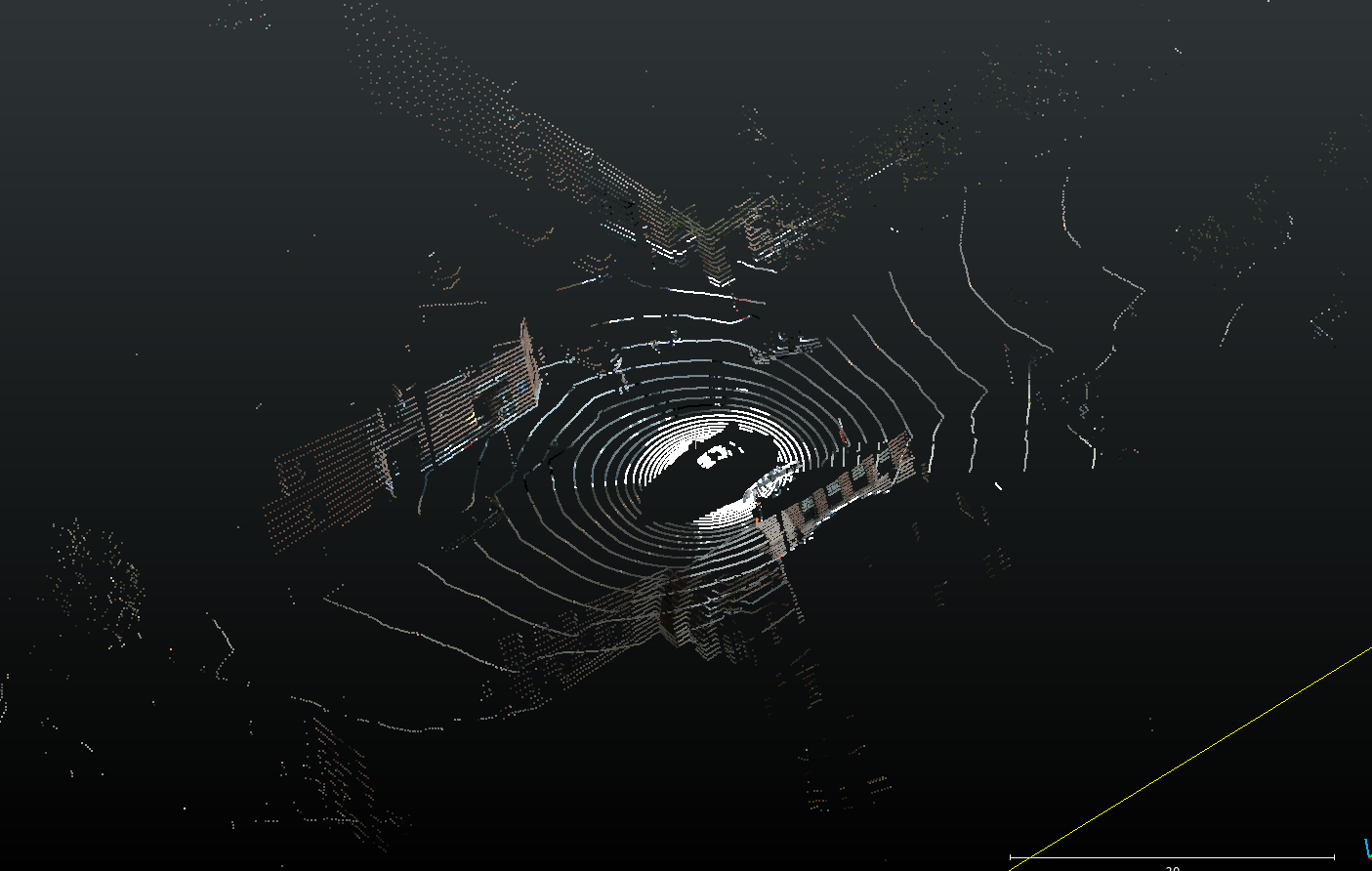
Point cloud segmentation is the process of dividing a 3D point cloud into distinct, meaningful regions or objects. A point cloud is a collection of data points defined in a three-dimensional coordinate system, typically captured through LiDAR, 3D scanners, or photogrammetry. Each point in the cloud represents a position in space, often accompanied by attributes such as color, intensity, or reflectivity. Segmentation transforms this raw data into structured, interpretable elements, enabling the extraction of relevant information for analysis and decision-making.
With the increasing adoption of 3D scanning technologies in fields such as autonomous driving, robotics, and urban modeling, the demand for precise and efficient segmentation methods has surged. Point cloud segmentation serves as a fundamental step in making sense of these massive datasets, allowing for object identification, scene understanding, and environmental mapping.

Importance of Point Cloud Segmentation
The significance of point cloud segmentation lies in its broad range of applications across industries. In the context of autonomous vehicles, point cloud segmentation enables the detection and classification of objects such as other vehicles, pedestrians, and infrastructure elements, which is essential for real-time decision-making. In robotics, segmentation is instrumental for tasks such as navigation, obstacle avoidance, and object manipulation. It also plays a pivotal role in fields like architecture, construction, and environmental monitoring, where detailed 3D models of buildings, landscapes, and urban environments are created.
Effective segmentation allows for the reduction of complex 3D data into manageable components, improving the accuracy and speed of subsequent tasks like classification, recognition, and scene reconstruction. The ability to segment large, unstructured datasets into coherent parts facilitates better interpretation and enhances performance across various applications.
Methods and Techniques
Point cloud segmentation methods vary in complexity and applicability based on the use case, accuracy requirements, and computational constraints. Below are some of the most commonly used techniques.
1. Semantic Segmentation
Semantic segmentation assigns a specific label to each point within a point cloud, categorizing it into predefined classes such as ground, vegetation, buildings, or vehicles. This method is widely used in tasks where detailed scene understanding is required, such as autonomous driving and urban planning. Approaches like Conditional Random Fields (CRFs) and Markov Random Fields (MRFs) have been employed alongside machine learning models to improve accuracy in labeling each point. Semantic segmentation provides detailed insight into a scene, making it indispensable in applications where precise object classification is critical.
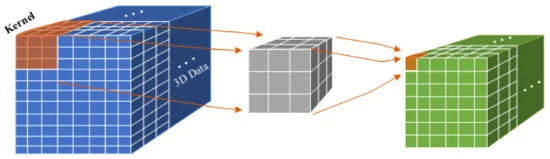
3D-CNN
3D Convolutional Neural Networks (3D-CNNs) are a natural extension of standard CNNs, but instead of operating on 2D grids, they work on 3D voxel grids. In 3D-CNNs, convolutional kernels slide over 3D spaces, capturing spatial relationships along all three axes. This allows the network to extract features that consider both local and global contexts, which is particularly useful when working with unstructured data like point clouds.
One limitation of using 3D-CNNs, though, is that voxelization introduces resolution constraints. While this approach simplifies computations by discretizing space, it can lead to loss of detail in high-density regions.
2. Feature Extraction
Feature extraction focuses on identifying and isolating key attributes from a point cloud, such as geometric characteristics (surface normals, curvature, etc.), which are then used to guide the segmentation process. Techniques like Principal Component Analysis (PCA) and Eigenvalue analysis help in deriving these features, simplifying the data and revealing the underlying structure of objects within the cloud. Effective feature extraction reduces computational complexity and enhances segmentation performance, particularly in scenarios where distinguishing between objects with similar spatial distributions is challenging.
3. Clustering Methods
Clustering is a widely-used technique for grouping points based on spatial or feature-based similarities. It helps in isolating different objects or regions within a point cloud, making it a useful tool for segmentation.
K-means Segmentation
K-means is a popular clustering algorithm for segmenting point clouds. It works by partitioning points into k clusters, where each point is assigned to the cluster whose centroid is closest. The algorithm iteratively refines these clusters until an optimal partition is achieved. While K-means is computationally efficient and works well for simple, well-separated clusters, its effectiveness diminishes in more complex or noisy environments. Despite this limitation, K-means remains a go-to technique for basic segmentation tasks due to its simplicity and speed.
DBSCAN (Density-Based Spatial Clustering of Applications with Noise) (this)
DBSCAN identifies clusters based on point density, making it effective for detecting clusters of arbitrary shapes and sizes. It requires two parameters: the neighbourhood radius and the minimum number of points to form a cluster. DBSCAN is robust to noise and ideal for segmenting complex or irregularly shaped objects, but its performance may vary depending on parameter tuning.
Hierarchical Clustering
This method builds a hierarchy of clusters by either merging smaller clusters into larger ones (agglomerative) or splitting larger clusters into smaller ones (divisive). Hierarchical clustering is flexible and does not require a predefined number of clusters, making it suitable for exploring cluster structures in diverse datasets. However, it is computationally intensive for large point clouds.
Mean Shift Clustering
This technique iteratively shifts points towards the densest region in a dataset, effectively identifying clusters based on density peaks. It does not require a predefined number of clusters, making it highly adaptive.
GMM (Gaussian Mixture Model) (this)
A probabilistic model that assumes data points are generated from a mixture of Gaussian distributions. It is effective for overlapping clusters and provides a soft assignment of points to clusters.
4. Graph-based Techniques
Graph-based approaches represent point clouds as graphs, where each point is treated as a node, and edges are formed based on spatial relationships between neighboring points. Segmentation is achieved by partitioning the graph into subgraphs using algorithms like the Minimum Spanning Tree (MST). These methods are well-suited for handling large and complex point clouds, particularly when global spatial relationships are critical. Graph-based methods are also highly scalable and offer flexibility in handling irregularly shaped clusters.
5. Region Growing
Region growing is a commonly-used technique where the segmentation process begins with a seed point, and neighbouring points are iteratively added to the region if they meet predefined criteria, such as proximity or surface normal similarity. This approach is especially effective for segmenting continuous, homogeneous surfaces like walls or roads. Region growing methods are known for their accuracy and simplicity, requiring minimal parameter tuning. However, they can struggle with noisy or highly irregular point clouds, where maintaining homogeneity is challenging.
6. Homogeneous Region Segmentation
Homogeneous region segmentation focuses on grouping points with similar properties, such as curvature or surface smoothness, to form continuous, coherent regions. This technique is particularly valuable in architectural modeling, where large surfaces need to be segmented, or in environmental applications where terrain features must be extracted. Techniques like curvature analysis and surface normal consistency are often employed to identify homogeneous regions within a point cloud, providing an efficient way to handle large, complex datasets.
7. Deep Learning in Point Cloud Segmentation
Deep learning has made significant strides in point cloud segmentation, offering state-of-the-art performance in many applications. Models like PointNet and its extensions have revolutionized the field by enabling end-to-end learning from raw point clouds. PointNet processes individual points using shared multi-layer perceptrons and aggregates global features through a symmetric function. This approach eliminates the need for manual feature engineering, allowing deep learning models to automatically extract the most relevant information from the data. Deep learning methods are especially powerful for complex, large-scale point clouds and offer a high degree of generalization across different datasets.
8. Large Scale Segmentation
Large-scale point clouds, such as those generated by LiDAR scans of urban areas, pose challenges in terms of data size and computational complexity. Techniques like voxelization reduce the resolution of point clouds by dividing the data into volumetric grids, facilitating more efficient processing. Other approaches, such as multi-resolution methods and parallel processing, have been developed to handle the segmentation of large datasets in real-time, making them ideal for applications like autonomous driving and city-scale 3D modeling.
Applications
Robotic Applications
In robotics, point cloud segmentation enables robots to perceive their surroundings, navigate through environments, and manipulate objects. By segmenting the 3D scene into distinct objects and surfaces, robots can plan their movements more effectively. Segmentation is also critical for tasks such as object picking, scene understanding, and SLAM (Simultaneous Localization and Mapping).
Autonomous Driving
Autonomous vehicles rely heavily on point cloud segmentation to understand their environment. Lidar point clouds are segmented to identify lanes, pedestrians, obstacles, and other vehicles. The high resolution of Lidar data enables precise object detection and classification, which is crucial for making safe driving decisions. Point cloud segmentation also plays a role in dynamic object tracking, allowing vehicles to anticipate the movement of other objects on the road.
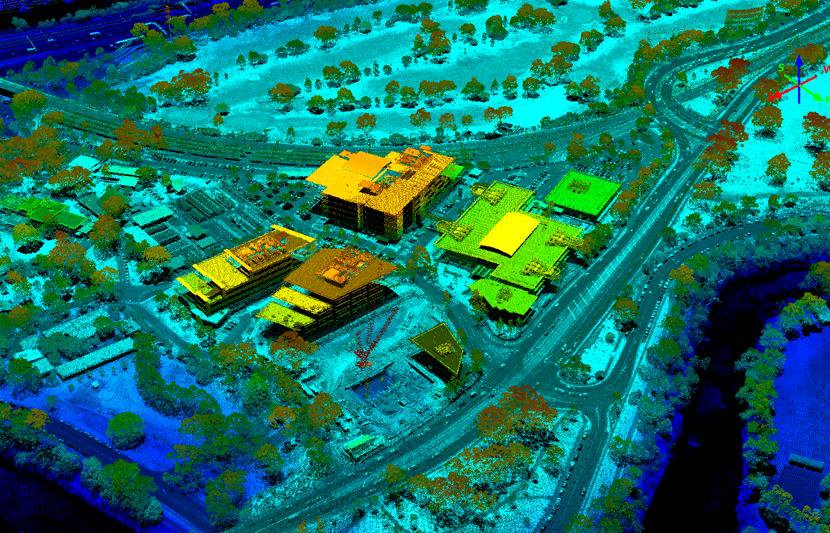
Surveying
In surveying, point cloud segmentation can be used to break down large point cloud maps into manageable, meaningful components. When dealing with complex environments, like those found in land surveying or urban infrastructure mapping, raw point clouds are dense and chaotic. Here, Segmentation helps to isolate features like buildings, roads, vegetation, or terrain, making it easier to extract actionable data. For instance, identifying ground points in a cluttered urban environment is essential for generating accurate digital elevation models (DEMs).
This technique is also useful in monitoring changes over time. By segmenting point clouds from repeated surveys, differences like terrain shifts or structural modifications can be quickly pinpointed. With the right segmentation algorithms, surveyors can automate a large portion of their workflows, speeding up the time from data collection to decision-making.
Conclusion
Point cloud segmentation is a rapidly evolving field, driven by advancements in deep learning and scalable processing techniques. From semantic segmentation to graph-based methods, the variety of approaches available enables robust solutions for diverse applications. As 3D sensing technologies become more pervasive, the need for more efficient, accurate, and real-time segmentation methods will continue to grow. Future research is likely to focus on improving the scalability of segmentation techniques, reducing computational costs, and enhancing the performance of deep learning models, ensuring that point cloud segmentation remains a cornerstone of 3D data analysis across industries.